Gemide Navigasyon Cihazları
1.Radar
1.1 Genel Açıklamalar / Tanımlar
Radar, her türlü görüş koşullarında, gözcü için önemli bir ekipmandır. İlk ortaya çıkışından bu yana prensipler genel olarak aynı kalsa da, modern radar ekipmanlarının yeni özellikler ve teknolojiler ile gelişim gösterdiklerini belirtmek gerekir; denizci, bunların işlevinin ve ilişkili sınırlamaların tam olarak farkında olmalıdır. Yanlış bakım, kurulum ve kullanma prosedürleri radar ekipmanının etkinliğini ciddi şekilde sınırlayabilir, bu nedenle ekipmanı tanıma ve radarın data giriş ve çıkışlarını kontrol etmenin önemi büyüktür.
Çatışmalar, kısıtlı görüşte ve iyi görüşte radar ve radar ekolarını etkili bir şekilde kullanmamaktan kaynaklanan hatalar nedeniyle sıkça meydana gelmiştir. Sıkça karşılaşılan hatalar arasında yetersiz bilgiye dayalı rotayı değiştirme ve özellikle yakın mesafe durumunun geliştiği durumlarda emniyetli hızın üzerinde bir hızla ilerleme bulunmaktadır. Radar ve radar ekoları tarafından iyi hava koşullarında sağlanan bilgiler, yoğun trafik olan bölgelerde büyük destekçi olabilir. Kısıtlı görüşte seyir yapmanın daha zorlayıcı olabileceğini ve radar / ARPA dahil olmak üzere çeşitli elektronik seyir yardımcılarından gelen miktarda bilgi nedeniyle dikkatli olunması gerektiğini hatırlamak önemlidir. Sürekli radar ile pilotlama veya hedef takibi yapılamıyorsa, daha da büyük bir dikkatle hareket edilmelidir. “Emniyetli hız,” radar kullanan gemiler için Denizde Çatışmaları Önleme Uluslararası Kuralları 1972’nin 6. kuralında belirtilmiştir.
1.2 Otomatik Pilotlama Sistemleri Çeşitleri
Radarlar, çeşitli gemi boyutlarına bağlı olarak aşağıdaki gibi farklı tiplerde donatılmıştır:
- Elektronik Çizim Yardımı (EPA): EPA ekipmanı, en az 20 hedefin elektronik çizimini sağlar, ancak bunu otomatik takip olmadan yapar. (300 Gross Tonaj (GT) ve üzeri gemiler ve 500 GT’nin altındaki gemiler).
- Otomatik Takip Yardımı (ATA): ATA ekipmanı, en az 30 hedefin manuel edinimini ve otomatik takibini ve gösterimini sağlar (500 GT ve üzeri gemiler). 3.000 GT ve üzeri gemilerde, ikinci radarın da bir ATA ile donatılması gerekmektedir. İki ATA’nın birbirinden fonksiyonel olarak bağımsız olması gerekir.
- Otomatik Radar Çizim Yardımı (ARPA): 10.000 GT ve üzeri gemilerde gereken ARPA ekipmanı, en az 40 hedefin manuel veya otomatik edinimini ve çarpışma önleme kararı vermek için tüm ilgili hedef bilgilerinin otomatik takibini ve gösterimini sağlar. Ayrıca deneme manevralarının gerçekleştirilmesine olanak tanır. İkinci radarın ARPA özelliği yoksa,mutlaka ATA özelliği olmalıdır.
Manuel radar plotlama özellikli radar ekipmanı, yalnızca hala SOLAS V/74’e uygun olan mevcut gemiler için kabul edilebilir. Bunun dışında günümüzde görmek mümkün değildir.
Vardiya zabitleri, ARPA Radar kullanımı ve sınırlamaları konusunda tamamen bilgi sahibi olmalı ve becerilerini geliştirmek için açık hava koşullarında pratik yapmalıdır.
Radar (örneğin ARPA gibi) bir hedefi tespit etme ve ardından veri ve çözümleri doğru bir şekilde hesaplama süresine dikkat edilmelidir. Bu, tam ve düzeltilmiş doğruluğa ulaşmadan önce 3 dakikaya kadar sürebilir ve bu zaman çerçevesinden önce hareket etmek daha yüksek risk taşıyabilir. Radarın kullanımı, vardiya zabitinin nesneleri ve tehlikeleri erken tanıma gereksinimini azaltmaz. Bu hata toleranslarının minimum değerleri, özellikle CPA için bilinmelidir, çünkü yakın mesafede yaklaşıldığında CPA, radar tarafından gösterilen daha büyük bir değere rağmen sıfıra yakın olabilir.
Yukarıda verilen önerilere ek olarak ve kullanma kılavuzlarında bulunan talimatlara uygun olarak, radar izleme yardımlarını kullanan kullanıcılar şunları sağlamalıdır:
- Radarın performansı izlenmeli ve optimize edilmelidir.
- Sağlanmışsa, test programları, çizim verilerinin geçerliliğini kontrol etmek için kullanılmalıdır.
- ARPA/ATA’ya hız ve başlık girişleri tatmin edici olmalıdır. Doğru hız girişi, uygun ARPA/ATA kontrollerinin manuel ayarı veya harici bir giriş tarafından sağlandıysa, ARPA/ATA verilerinin doğru işlenmesi için hayati önem taşır. ARPA/ATA’ya yanlış pruva ve/veya hız girişleri yapıldığında ciddi hatalar çıkabilir.
1.3 Hedefleri İzleme
Radar, çarpışma riskinin var olup olmadığını veya yakın mesafe durumunun gelişme olasılığı olduğunu değerlendirmede yardımcı olmak için kullanılmalıdır.
Başka bir gemi ile çarpışma riskini tahmin etmek için, çarpışmanın en yakın noktası (CPA) ve En Yakın Noktaya Varış Zamanı (TCPA) önceden belirlenmelidir. Uygun kaçınma manevrasının seçimi, diğer geminin rotasının bilinmesin ve kullanılması ile kolaylaştırılır. Ancak elde edilen bilgilerin doğruluğu, kendi gemisinin pruva bilgisi ve hızının doğru ölçülmesine bağlıdır, ki bu da uygun dış sensörler aracılığıyla radar ekipmanına giriş yapılır. Önemli bir nokta şudur ki, yanlış pusula pruva veya hız girişi, ARPA veya ATA kullanılırken hedef gemisinin gerçek vektörlerinin doğruluğunu azaltacaktır.
Eğer iki radar varsa, özellikle sınırlı görüş, yoğun, veya sığ sularda, bir tanesini çatışma önleme görevleri için kullanılarak, diğerini de navigasyona yardımcı olması için kullanmak iyi bir uygulamadır. Eğer radarlardan sadece biri otomatik hedef takibi ile donatılmışsa, o zaman bu anti-çarpışma görevleri için kullanılmalı, diğeri de navigasyon için kullanılmalıdır.
Bir eko’nun menzil ve yönünün tek bir gözlemi, diğer geminin göreceli rotası veya başlığının bir göstergesini vermez. Bunun tahmin edilmesi için belirli bir zaman aralığında ardışık sistemli gözlemler yapılmalıdır. Gözlem süresi ne kadar uzun olursa, sonuç o kadar doğru olacaktır. Bu prensip aynı zamanda CPA/TCPA’yi değerlendirmek ve uygun eylemi belirlemek için doğru bilgi üretmek için yeterli zaman gerektiren ARPA/ATA için de geçerlidir.
Pusula yönü, görsel olarak ya da radar ile gözlemlendiği şekliyle, çarpışma riskini değerlendirmek için kullanılmalıdır. Bir hedefin nisbi yönü, kendi gemisinin rotası ve/veya hızı değiştiğinde kullanılmamalıdır, çünkü çarpışma riski, nisbi yön değişse bile hala var olabilir. Denizciler, yakın mesafede, pusula yönü değişse bile çarpışma riskinin hala var olabileceğinin farkında olmalıdır.
Eğer kullanılan radar üzerinde AIS hedef bilgileri mevcut ise, bir hedef seçerken dikkatli olunmalı ve gösterilen hedef bilgilerinin ARPA tarafından üretilen veri olduğundan emin olunmalıdır, çünkü AIS verilerinde potansiyel doğruluk eksiklikleri olabilir ve AIS suya göre hız yerine yere göre rotayı/hızı kullanır, bu da gözlemci için hedefin yanıltıcı bir görünümüne neden olabilir.
AIS verileri durumsal farkındalığı artırmak için kullanılabilir, ancak çarpışmadan kaçınmak için güvenilmemelidir.
1.4 Ekipmanın Performansını Doğrulama
Zabitin radarın mevcut performansının farkında olması esastır; bu, IMO performans standartlarında belirtilen yönergeleri takip ederek ve Performans Monitörü’nü kullanarak belirlenebilir. Gemi kaptanları ve vardiya zabitleri, eğer varsa, performans kontrolü ve sıklığına dair ayrıntıları içeren ekipman üreticisinin talimatlarına başvurmalıdır. Bu talimatların radar ekranına yakın bir yerde asılı olması, zabitlerin işlerini kolaylaştıracaktır.
Gözlemci, direkler ve diğer gemi yapısı sebepli engellerden kaynaklanan gölgeli ve kör sektörlerin açılarının farkında olmalıdır. Bu bölgelerin bir diyagram üzerine çizilip radar ekranına yakın bir yere yerleştirilmesi önerilir. Bu diyagram, sektörleri etkileyen herhangi bir değişiklikten sonra güncellenmelidir.
1.5 Operasyonel Kontroller
Radar ayarlarının, algılama ve ekran düzeninin düzenli olarak kontrol edilmesi, ekranın kalitesinin ve radarın performansının bozulmadığından emin olmak için yapılmalıdır. Vardiya zabiti, diğer ekipmanların radar için veri ve giriş beslemesi sağlayan hangi özelliklere sahip olduğunu bilmelidir, örneğin bunlar parakete ya da gyro olabilir.
Heading göstergesinin hafif bile olsa yanlış hizalanması, özellikle sınırlı görünürlükte hedeflerin pruva veya pruvaya yakın yaklaştığı potansiyel çarpışma durumlarında yanıltıcı bir yorumlamaya yol açabilir. Bu nedenle heading göstergesinin periyodik olarak kontrol edilmesi, doğru hizalamanın korunduğundan emin olmak önemlidir. Eğer yanlış hizalama varsa, en kısa sürede düzeltilmelidir.
1.6 Ayar ve parametre seçimi
Birçok gemi, hem X hem de S band radarları ile donatılmıştır ve iyi bir köprüüstü ekibi, her iki radar türünün avantajlarını ve dezavantajlarını bilmelidir.
X-Band Radar
3cm – 9GHZ
9 GHz SART’ı algılayabilme yeteneği
Geliştirilmiş küçük hedef tespiti.
Yüksek frekanstan kaynaklanan yüksek çözünürlüklü görüntü, seyir sırasında kıyı tespitini iyileştiriyor
S-Band Radar
10cm – 3GHZ
Ağır hava koşullarında geliştirilmiş hedef tespiti
Daha uzun menzilde geliştirilmiş tespit
Geliştirilmiş Sea Clutter
Menzil ölçeğinin seçimi, herhangi bir radar setinde önemlidir ve periyodik tarama, daha uzun menzilli bir ölçekte tehlikelere karşı önceden uyarı yapma olanağı sağlar. Kısa menzilli bir ölçekte hedef edinme, çarpışma riskini değerlendirmek ve gerekli önlemleri almak için yeterli zamanı sağlamayabilir. Bu özellikle yüksek trafik yoğunluğunun olası olduğu bölgelere yaklaşılırken veya daha uzun menzilli ölçeklerin kullanımından elde edilen erken bir değerlendirme, güvenli hızı belirlemede önemli bir faktör olabilir. Daha genel olarak, gözlem ve çizim için menzil ölçeklerinin seçimi, trafik yoğunluğu, kendi geminin hızı, hakim hava koşulları, seyir tehlikelerinin yakınlığı ve gözlem sıklığı gibi birkaç faktöre bağlıdır.
Modern radar setleri, kullanılan menzil ölçeğine bağlı olarak pals uzunluğunu otomatik olarak seçebilir. Ancak, bu operatör tarafından kontrol edilmelidir ve bu özelliğe sahip olmayan radarlar için gözcü, kullanılan pals uzunluğunun menzil ölçeğine uygun olduğunu sağlamalıdır. Genel olarak, bu, kısa pals uzunluklarının daha kısa menzilli taramalar için kullanılmasıyla doğru orantılı olacaktır ve bunun tersi de geçerlidir. Gözcü, daha uzun pals uzunluklarının menzilde daha büyük tespit sağlamasına rağmen, ışının azaltılmış çözünürlüğü nedeniyle birbirlerine yakın hedefleri gölgeleyebileceğinin farkında olmalıdır.
1.7 Stabilizasyon
Vardiya zabiti, amaçlanan kullanım için en uygun stabilizasyon modunu belirlemelidir.
Ground (Yere Göre) Stabilizasyon
Hız ve Pruva bilgisi GNSS’den gelir.
Rota ve hız yere göredir.
Kıyısal seyir için iyi bir tercihtir.
Akıntı yönü ve hızı genelde görsel olarak ekranda gözükür.
Geminin gerçek yönünü belirlemek zordur.
Sabit bir hedef sabit görünecektir.
Sea (Suya Göre) Stabilizasyon
Hız ve Pruva bilgisi Gyro’dan gelir.
Rota ve hız suya göredir.
Çatışmayı önlemek için en iyi tercihtir.
Akıntı yönü ve hızını dikkate almaz.
Geminin gerçek yönü kolayca belirlenir.
Sabit hedef, sete karşı ters yönlü bir vektör yöne sahip olacaktır ve hız, akıntının hızını gösterecektir.
Tavsiye ve kurallara göre, deniz stabilizasyonlu mod, açık deniz ve çarpışma önleme kararları için tercih edilen moddur. Bu, radar ARPA hesaplamasında akıntı yönü ve hızının dikkate alınmamasından dolayıdır ve bu nedenle bir hedefin gerçek vektörü, diğer gemilerin durumunun daha doğru bir temsilini sağlar.
Ancak, deniz stabilizasyonlu modda kara, şamandıralar veya demirli gemiler gibi sabit nesneler, gerçek hareketle izler gösterecektir. Bu, sabit ve hareketsiz hedefler arasındaki farkı ayırt etmeyi zorlaştırabilir ve operatöre aşırı gürültü ve potansiyel karışıklık sebep olabilir. Radarı yer stabilizasyonlu moda ayarlamak, bu sorunu önleyecek ve gözcüye sabit veya hareketsiz nesneler ile hareket eden nesneler arasında daha fazla farklılaşma olanağı tanıyacaktır.Yer stabilizasyonlu mod aynı zamanda gözcüye, gemisinden kaynaklanan gerçek bir vektör aracılığıyla kendi set ve akıntısını açıkça gösterir. Bu, kıyı ve pilotaj navigasyonu sırasında durumsal farkındalığı artırabilir, ancak operatör, set ve akıntının uygulandığı konumda hedeflere de uygulanacağını bilmelidir, bu da radar üzerinde beklenen görüntülemenin görsel belirlemeden farklı olabileceği anlamına gelebilir.

Çatışmayı Önleme ve Radar Kullanımı, SOG ya da STW, Hangisi Kullanılmalı?
1.8 Motion (Relative/True)
Vardiya zabiti, seçilen hareket modunun farkında olmalı ve her ikisi arasındaki farkların tamamen farkında olmalıdır.
Gerçek hareket modu kullanıldığında, zabit kendi gemisinin görünen pozisyonu, geminin gerçek hareketine uygun bir hızda radar ekranında hareket eder. Ancak, göreli hareket modunda, navigator’ın kendi gemisinin görünen pozisyonu sabit kalacaktır.
1.9 Hedef İzlerinin Kullanımı
Vardiya zabiti, farklı hedef izi seçeneklerinin farkında olmalı ve her modun sunduğu görsel göstergeler arasındaki farkı takdir etmelidir.
Nisbi izlerle, diğer gemilerin nisbi hareketi, her iki geminin toplu hareketi temelinde görüntülenir. Ancak Gerçek izlerle, izler, hedeflerin rotası ve yer üzerindeki hızlarına bağlı olarak gerçek hareketlerini gösterir. Kara veya sabit bir seyir işareti gibi sabit bir nesne, gerçek bir iz oluşturmaz.
Nisbi izler, çarpışma riskine dair bir gezgin için hızlı bir gösterge sağlayabilir, ancak aynı zamanda kara kütlesi veya demirli gemiler gibi sabit hedeflerden gereksiz izler de ekleyebilir.
1.10 Display orientation modes
Radar ekranını ayarlarken, operatörün farklı ekran modları ve bunlar arasındaki farklar konusunda bilgi sahibi olması önemlidir.
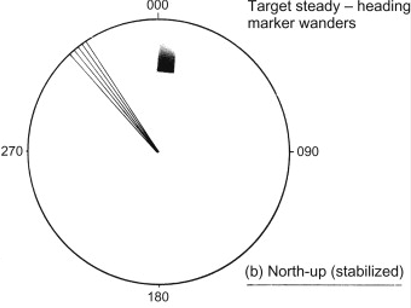
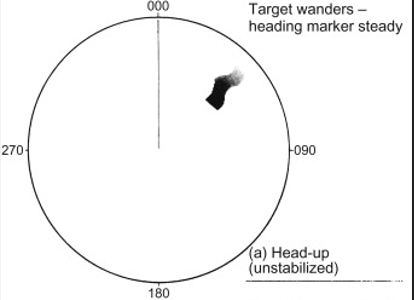
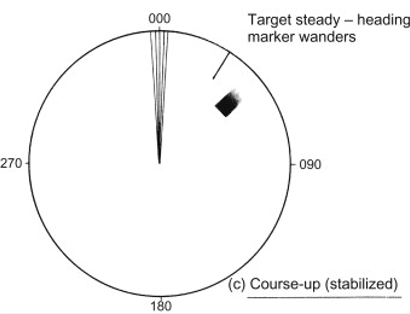
Head-Up (HU) modunda, ekranın “yukarı” yönlendirmesi geminin pruvasını temsil eder ancak bir pruva girişi kullanılmadığı için “stabilize edilmemiştir”; course-up (CU) modunda geminin seyrini temsil eden yöndür; ve North Up (NU) modunda ekran, ekranın üst kısmının kuzey olduğu bir standart ECDIS ekranına benzer şekilde yönlendirilir.
NU görüntüsü, genellikle kıyı seyiri sırasında tercih edilir çünkü temsil, bir ECDIS veya harita ekranıyla eşleşir. Ancak çarpışma önleme sırasında, gözcünün görsel olarak gördüğüne eşleşen bir HE / CU ekran tercih edilebilir.
North Up ve Course Up görüntü modları, bir gyro cihazından pruva girişi gerektirir. Pruva girişinde bir arıza meydana gelirse, radar HU, stabilize edilmemiş bir moda dönecektir.
1.11 Kullanım / Operation
Eğer varsa, radarın trafik yoğunluğuna veya görünürlük durumuna bakılmaksızın her zaman çalışıyor olması gerekmektedir.Radarlar sürekli çalışma için tasarlanmıştır ve onları sık sık açıp kapatmak, teknik zorluklara neden olabilir, ayrıca ayarları silme riski taşır. Hava koşulları görünürlüğün kötüleşebileceğini gösterdiğinde ve geceleyin küçük tekneler veya aydınlatılmamış enkaz gibi engellerle karşılaşma olasılığı varsa, varsa her iki radar da sürekli olarak çalışmalı, bir tanesi çarpışma önleme çalışmalarına özel olarak ayrılmalıdır. Bu özellikle ara sıra sis bankalarının olası olduğu durumlarda önemlidir, böylece gemiler sis içine girmeden önce tespit edilebilir. Radarın gereksinim ve kullanımı, özellikle kısıtlı görünürlükte veya çarpışma riskinin değerlendirilmesi sırasında, COLREG’de belirtildiği gibi dikkatlice düşünülmelidir.
ARPA özelliklerinin kullanımı iş yükünü azaltmaya yardımcı olabilir ancak tamamen güvenilmemeli ve dikkatli kontrol ve görsel gözetimle uyum sağlanmalıdır. ARPA özellikleri kullanılıp kullanılmamasına bakılmaksızın, vardiya zabiti, geçmişte ve artık bir risk olarak kabul edilmeyen seçilmiş hedeflerin düzenli olarak temizlenmesini düşünmelidir. Bu, karışıklığı, karmaşık ekranları, gereksiz alarmları ve olası teknik arızaları önleyecektir.
RIO, radar görüntüsünü resmi bir ENC ile hizalamak suretiyle GNSS kalitesini doğrulamak için ECDIS üzerinde kullanılabilen bir özelliktir.
Radarı konum belirleme ve izleme amacıyla kullanırken, aşağıdakiler göz önünde bulundurulmalı ve kontrol edilmelidir:
(i) Sabit nesnelerin kimliği,
(ii) Gelgit değişiklikleri ve buz, kıyı çizgisini önemli ölçüde değiştirebilir ve bu nedenle konum belirleme ve izleme doğruluğunu etkileyebilir,
(iii) Radarın genel performansı,
(iv) Gyro hata oranı ve başlık işaretçisinin hizalamasının doğruluğu,
(v) Paralel indeks çizgilerinin uygun bir ekranda doğru konumlandırıldığı; ve
(vi) Değişken menzil işaretleyicisi, taşıyıcı işaretçi ve sabit menzil halkalarının doğruluğu.
1.12 Parallel Index
Paralel İndeks teknikleri, bir geminin konumunu önceden belirlenmiş bir geçiş planına göre sürekli olarak izleme ve dolayısıyla GNSS bütünlüğünü izleme veya GNSS olmadan seyir yapma yolunu sağlar. Paralel indeksleme, zabitler tarafından, tekniği tam olarak bilmesini ve daha zorlu durumlarda kullanmaktan emin olmasını sağlamak için açık havada basit kıyı geçişleri sırasında uygulanmalıdır; örneğin, sınırlı sular, kısıtlı görünürlük, karanlık veya GNSS reddi durumlarında.
Paralel indeksleme prensipleri, elektronik indeks çizgileri kullanılarak uygulanabilir. Bir dizi indeks çizgisi önceden ayarlanabilir ve gerektiğinde çağrılabilir, ancak özellikler farklı radar seti tipleri ve modelleri arasında değişecektir. Önceden ayarlanmış paralel indeks çizgilerini etkinleştirirken, geçiş için doğru çizgilerin görüntülendiğinden emin olmak için dikkatli olunmalıdır.
1.12.1 Parallel Index Teknikleri
Paralel İndeksleme (P.I.), hem Deniz hem de Zemin Stabilizeli radar ekranlarında kullanılabilir. Referans ilk olarak haritaya ve planlanan rotaya yapılır. İndeks çizgisi, planlanan rotaya dik olan bir uzaklıkta çizilir ve bu uzaklık, uygun bir sabit hedeften geçme planlanan uzaklığa eşittir. Sabit nesnenin eko hareketinin indeks çizgisi boyunca gözlemlenmesi, geminin planlanan rotayı sürdürüp sürdürmediğini gösterecektir. Ekonun indeks çizgisinden sapması, geminin istenen rotayı sürdürmediğini hemen gösterecek ve düzeltici bir önlem alınmasını sağlayacaktır.
Paralel İndeksleme, Göreceli Hareket veya Gerçek Hareket içinde kullanılabilir, ancak P.I. Çizgisi’nin denizcinin kendi gemisine referanslanması gerektiğini unutmamak önemlidir. Göreceli harekette bu, ekran merkezine sabitlenmiş olmakla aynı olabilir, ancak Gerçek Hareket için gemi ile birlikte hareket etmesi gerektiğinden ekran üzerine sabitlenemez.
1.13 Speed Log Hatası / Arızası
Radarla bir hedefin görünüş açısını belirlemek ve gerçek başlık veya rota hesaplamasını tamamlamak, otomatik olarak yapılıyor olsun veya manuel olarak yapılıyor olsun, kendi gemisinin hız girişinin seçimine ve doğruluğuna bağlıdır. Bir parakete ve GNSS alıcısının her ikisi de radara bağlandığını varsayarsak, paraketenin arızalanması, radarın sadece Yere Göre Hız’ı belirleyebilme durumuna yol açacaktır. Vardiya Zabiti, bu tür bir arıza modunu nasıl tanımlayacağını ve çarpışma riskinin varlığını belirlerken, Bölüm 1.7’da açıklandığı gibi deniz ve yer stabilizasyonlu modlar arasındaki farkı anlamalıdır.
1.14 Gyro Hatası / Arızası
Gyro pusulası arızaları durumunda ve radarın başlık verisi bir manyetik pusuladan (TMC) sağlandığında, gözcüler manyetik pusula hatalarını belirlemeli ve uygulamalıdır.
Otomatik çizim ve izleme ekipmanının gerçek vektör fonksiyonu, başlık girişinin bir İletim Manyetik Pusuladan (TMC) türetildiği durumlarda dikkatlice kullanılmalıdır. Hedef takip tahmini, rotanın ve hızın sabit kalacağı varsayımına dayanan bir sabit durum takibi üzerine dayanır. Denizde, bir iletim manyetik pusula yeterince sabit bir başlık üretemeyebilir, bu da güvenilmez vektörlere yol açabilir. Radarın tüm başlık girişlerinin arızalanması, ekran modunun stabilize edilmemiş bir baş yukarı moda dönmesine neden olacaktır
1.15 Alarmlar
Alarmlar, bir hedefin önceden belirlenmiş bir mesafeye yaklaştığını, kullanıcı tarafından seçilen bir koruma bölgesine girdiğini veya önceden belirlenmiş bir CPA veya TCPA sınırını ihlal ettiğini belirtmek için kullanılabilir.
ARPA otomatik edinim modundayken, bu alarmlar özellikle radar tarafından kolayca farkedilemeyen küçük hedeflerin yakınında kullanıldığında dikkatle kullanılmalıdır. Kullanıcılar, ARPA işletme kılavuzuna başvurarak hedeflerin otomatik izlenmesi üzerindeki hata kaynaklarının etkilerini anlamalıdır. Bu tür alarmlar, denizcinin görevini, görme ve duygu dahil olmak üzere tüm mevcut araçlarla uygun bir gözetimi sürdürme yükümlülüğünü ortadan kaldırmaz.
Sorularınızı ileti altına, ya da İLETİŞİM bölümüne yazabilirsiniz.